一、定时器的实现原理
定时器的实现,依赖的是CPU时钟中断;时钟中断的精度,决定了定时器精度的极限。那么,一个时钟中断源如何实现多个定时器呢?
对于内核,简单来说就是用特定的数据结构管理众多的定时器,在时钟中断处理中判断哪些定时器超时,然后执行超时处理动作。而用户空间程序不直接感知CPU时钟中断,通过感知内核的信号、IO事件、调度,间接依赖时钟中断。
用软件来实现动态定时器常用数据结构有:时间轮、最小堆和红黑树。下面就是一些知名的实现:
- Linux内核的 Hierarchy 时间轮算法
- Asio C++ Library最小堆定时器实现
- nginx 使用红黑树结构管理定时器事件
下面,介绍一下Linux内核定时器的一些相关代码。
内核启动注册时钟中断:
// @file: arch/x86/kernel/time.c - Linux 4.9.7
// 内核init阶段注册时钟中断处理函数
static struct irqaction irq0 = {
.handler = timer_interrupt,
.flags = IRQF_NOBALANCING | IRQF_IRQPOLL | IRQF_TIMER,
.name = "timer"
};
void __init setup_default_timer_irq(void)
{
if (!nr_legacy_irqs())
return;
setup_irq(0, &irq0);
}
// Default timer interrupt handler for PIT/HPET
static irqreturn_t timer_interrupt(int irq, void *dev_id)
{
// 调用体系架构无关的时钟处理流程
global_clock_event->event_handler(global_clock_event);
return IRQ_HANDLED;
}
内核时钟中断处理流程
// @file: kernel/time/timer.c - Linux 4.9.7
/*
* Called from the timer interrupt handler to charge one tick to the current
* process. user_tick is 1 if the tick is user time, 0 for system.
*/
void update_process_times(int user_tick)
{
struct task_struct *p = current;
/* Note: this timer irq context must be accounted for as well. */
account_process_tick(p, user_tick);
run_local_timers();
rcu_check_callbacks(user_tick);
#ifdef CONFIG_IRQ_WORK
if (in_irq())
irq_work_tick();
#endif
scheduler_tick();
run_posix_cpu_timers(p);
}
/*
* Called by the local, per-CPU timer interrupt on SMP.
*/
void run_local_timers(void)
{
struct timer_base *base = this_cpu_ptr(&timer_bases[BASE_STD]);
hrtimer_run_queues();
/* Raise the softirq only if required. */
if (time_before(jiffies, base->clk)) {
if (!IS_ENABLED(CONFIG_NO_HZ_COMMON) || !base->nohz_active)
return;
/* CPU is awake, so check the deferrable base. */
base++;
if (time_before(jiffies, base->clk))
return;
}
raise_softirq(TIMER_SOFTIRQ); // 标记一个软中断去处理所有到期的定时器
}
二、内核定时器时间轮算法
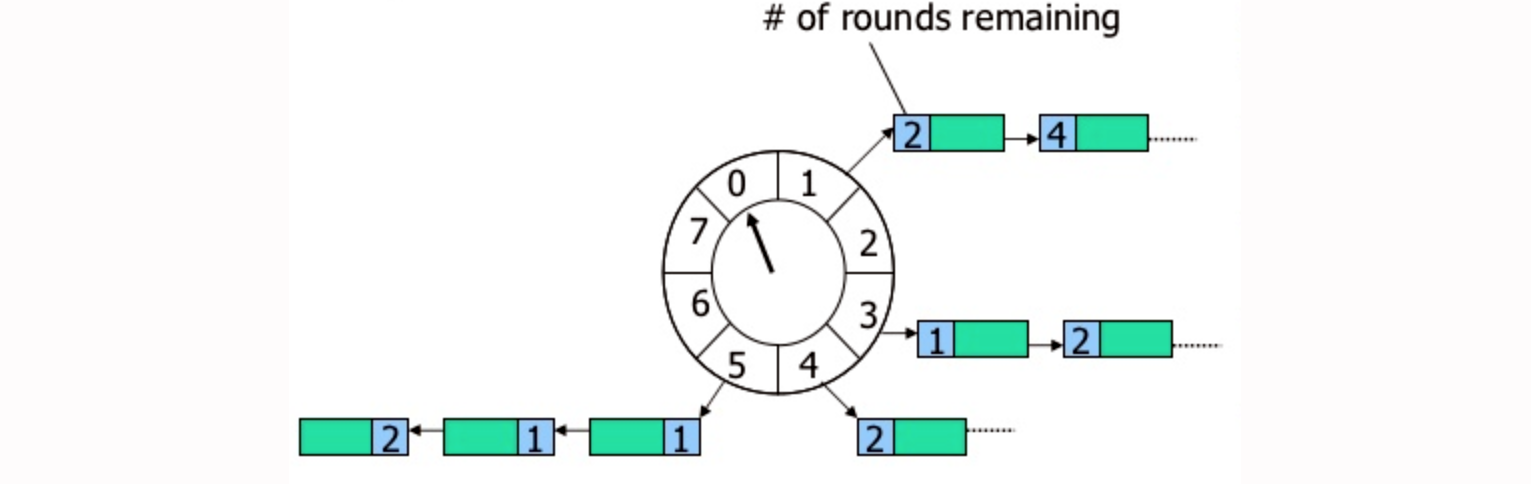
单层时间轮算法的原理比较简单:用一个数组表示时间轮,每个时钟周期,时间轮 current 往后走一个格,并处理挂在这个格子的定时器链表,如果超时则进行超时动作处理,然后删除定时器,没有则剩余轮数减一。原理如下图所示:
Linux 内核则采用的是 Hierarchy 时间轮算法,Hierarchy 时间轮将单一的 bucket 数组分成了几个不同的数组,每个数组表示不同的时间精度,Linux 内核中用 jiffies 记录时间,jiffies记录了系统启动以来经过了多少tick。下面是一些代码:
// @file: kernel/time/timer.c - Linux 4.9.7
/*
* The timer wheel has LVL_DEPTH array levels. Each level provides an array of
* LVL_SIZE buckets. Each level is driven by its own clock and therefor each
* level has a different granularity.
*/
/* Size of each clock level */
#define LVL_BITS 6
#define LVL_SIZE (1UL << LVL_BITS)
/* Level depth */
#if HZ > 100
# define LVL_DEPTH 9
# else
# define LVL_DEPTH 8
#endif
#define WHEEL_SIZE (LVL_SIZE * LVL_DEPTH)
struct timer_base {
spinlock_t lock;
struct timer_list *running_timer;
unsigned long clk;
unsigned long next_expiry;
unsigned int cpu;
bool migration_enabled;
bool nohz_active;
bool is_idle;
DECLARE_BITMAP(pending_map, WHEEL_SIZE);
struct hlist_head vectors[WHEEL_SIZE];
} ____cacheline_aligned;
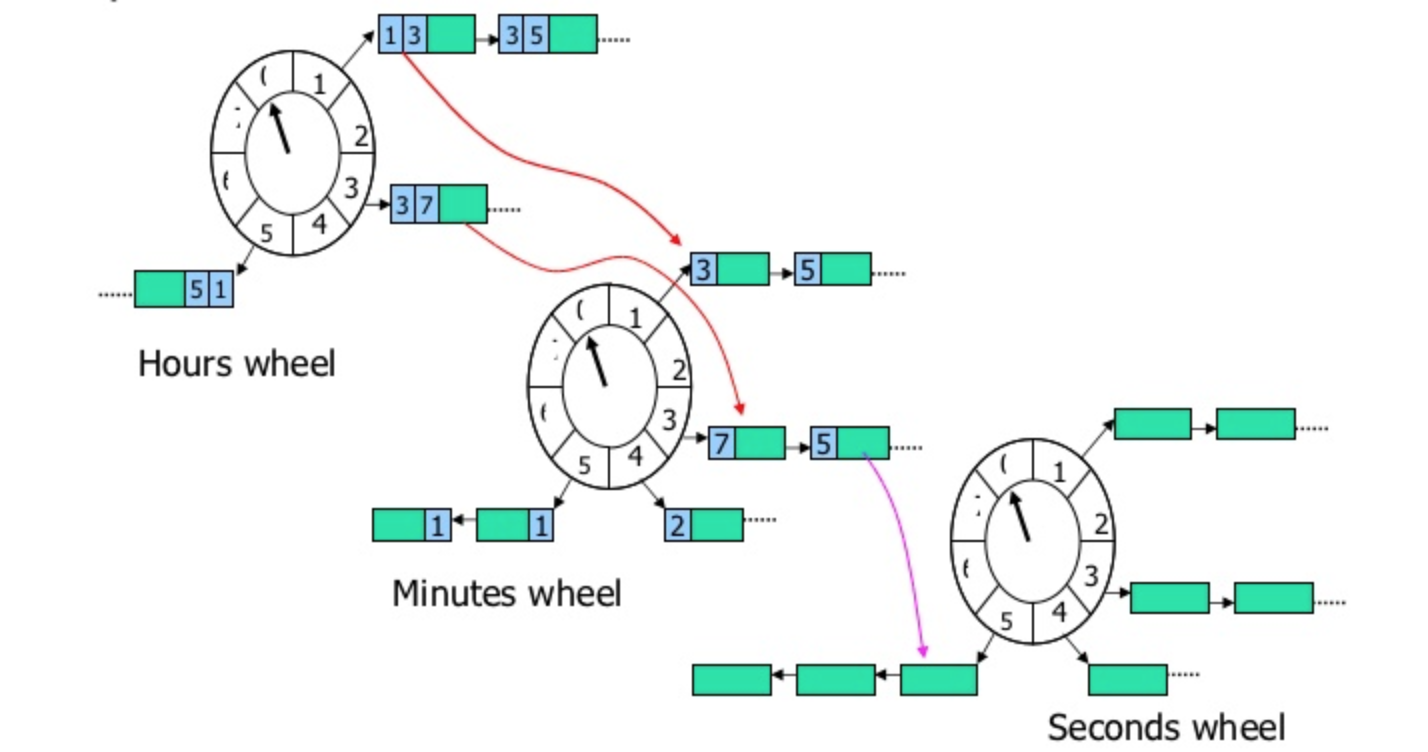
Hierarchy 时间轮的原理大致如下,下面是一个时分秒的Hierarchy时间轮,不同于Linux内核的实现,但原理类似。
对于时分秒三级时间轮,每个时间轮都维护一个cursor,新建一个timer时,要挂在合适的格子,剩余轮数以及时间都要记录,到期判断超时并调整位置。原理图大致如下图所示:
三、定时器的使用方法
在Linux 用户空间程序开发中,常用的定期器可以分为以下两类:
- 执行一次的单次定时器single-short
- 循环执行的周期定时器Repeating Timer
其中,Repeating Timer 可以通过在Single-Shot Timer 终止之后,重新再注册到定时器系统里来实现。当一个进程需要使用大量定时器时,同样利用时间轮、最小堆或红黑树等结构来管理定时器。而时钟周期来源则需要借助系统调用,最终还是从时钟中断。
Linux用户空间程序的定时器,可以用下面几种方法来实现:
- 通过alarm()或setitimer()系统调用,非阻塞异步,配合SIGALRM信号处理;
- 通过select()或nanosleep()系统调用,阻塞调用,往往需要新建一个线程;
- 通过timefd()调用,基于文件描述符,可以被用于 select/poll 的应用场景;
- 通过RTC机制, 利用系统硬件提供的Real Time Clock机制, 计时非常精确。
上面方法没提sleep(),因为Linux中并没有系统调用sleep(),sleep()是在库函数中实现,是通过调用alarm()来设定报警时间,调用sigsuspend()将进程挂起在信号SIGALARM上,而且sleep()也只能精确到秒级上,精度不行。当使用阻塞调用作为定时周期来源时,可以单独启一个线程用来管理所有定时器,当定时器超时的时候,向业务线程发送定时器消息即可。
一个基于时间轮的定时器简单实现:
#include
#include
#include
#include
#define TIME_WHEEL_SIZE 8
typedef void (*func)(int data);
struct timer_node {
struct timer_node *next;
int rotation;
func proc;
int data;
};
struct timer_wheel {
struct timer_node *slot[TIME_WHEEL_SIZE];
int current;
};
struct timer_wheel timer = {{0}, 0};
void tick(int signo)
{
// 使用二级指针删进行单链表的删除
struct timer_node **cur = &timer.slot[timer.current];
while (*cur) {
struct timer_node *curr = *cur;
if (curr->rotation > 0) {
curr->rotation--;
cur = &curr->next;
} else {
curr->proc(curr->data);
*cur = curr->next;
free(curr);
}
}
timer.current = (timer.current + 1) % TIME_WHEEL_SIZE;
alarm(1);
}
void add_timer(int len, func action)
{
int pos = (len + timer.current) % TIME_WHEEL_SIZE;
struct timer_node *node = malloc(sizeof(struct timer_node));
// 插入到对应格子的链表头部即可, O(1)复杂度
node->next = timer.slot[pos];
timer.slot[pos] = node;
node->rotation = len / TIME_WHEEL_SIZE;
node->data = 0;
node->proc = action;
}
// test case1: 1s循环定时器
int g_sec = 0;
void do_time1(int data)
{
printf("timer %s, %d\n", __FUNCTION__, g_sec++);
add_timer(1, do_time1);
}
// test case2: 2s单次定时器
void do_time2(int data)
{
printf("timer %s\n", __FUNCTION__);
}
// test case3: 9s循环定时器
void do_time9(int data)
{
printf("timer %s\n", __FUNCTION__);
add_timer(9, do_time9);
}
int main()
{
signal(SIGALRM, tick);
alarm(1); // 1s的周期心跳
// test
add_timer(1, do_time1);
add_timer(2, do_time2);
add_timer(9, do_time9);
while(1) pause();
return 0;
}
在实际项目中,一个常用的做法是新起一个线程,专门管理定时器,定时来源使用rtc、select等比较精确的来源,定时器超时后向主要的work线程发消息即可,或者使用timefd接口。
